
0
Suivez-nous
Les chercheurs ont développé une méthode pour diriger des robots nageurs microscopiques en utilisant des modèles de lumière et les principes de La théorie de la relativité d’Einstein. Cette technologie constitue une première étape potentielle vers le déploiement de minuscules robots dans des applications allant de la médecine à la fabrication.
L’un des défis majeurs du développement microrobots pour des applications pratiques, il s’agit de créer des machines capables de naviguer sans l’inclusion de capteurs encombrants et d’autres composants électroniques, ce qui rendrait les machines trop grandes pour fonctionner à l’échelle souhaitée (comme à l’intérieur d’un corps humain). Pour tenter de résoudre ce problème, des physiciens de l’Université de Pennsylvanie ont créé un « espace-temps artificiel » pour inciter les machines à voyager de la même manière que le font les vaisseaux spatiaux ou la lumière lorsqu’ils traversent l’univers.
Le défi était de guider les machines microscopiques avec suffisamment de précision pour qu’elles atteignent un point précis de l’espace, sans être bloquées par les parois du labyrinthe. C’est là qu’intervient la relativité. Selon la théorie de la relativité générale d’Einstein, pesanteur courbe l’espace-temps autour d’objets ayant une masse. La lumière et les objets suivent des géodésiques « droites » – les chemins les plus courts – qui semblent courbés autour des masses. La lentille gravitationnelle en est un bon exemple : bien que la lumière se déplace en ligne droite à travers le cosmos, il peut paraître courbé et agrandi lors du passage à travers le puits gravitationnel d’un objet massif, tel qu’un grand amas de galaxies.
« Nous avons montré que la façon dont les robots EK se comportent dans des champs lumineux structurés est identique aux chemins suivis par la lumière dans la relativité générale », a déclaré l’auteur principal de l’étude. Marc Miskinprofesseur adjoint d’ingénierie électrique et des systèmes à l’Université de Pennsylvanie, a déclaré à Live Science dans un e-mail. « Étonnamment, vous pouvez utiliser les robots comme analogues de la gravité puisque la correspondance est exacte. Alternativement, vous pouvez inverser les idées de la relativité générale pour les utiliser pour guider les robots : de la même manière que la gravité rapproche les objets, vous pouvez guider les robots vers un endroit spécifique. «
Espace-temps artificiel
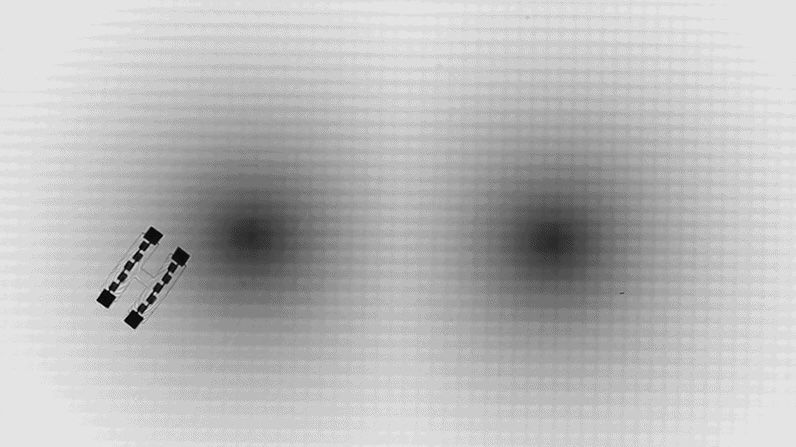
Pour imiter cet effet, l’équipe a modélisé le labyrinthe sous forme d’espace virtuel incurvé à l’aide d’équations de relativité. Les chemins vers la cible à l’intérieur du labyrinthe sont devenus de simples lignes droites dans le modèle. Ensuite, ils ont reconverti le modèle en une carte lumineuse 2D. Les points sombres attiraient naturellement les robots, tandis que les points plus clairs les repoussaient. Le point final du labyrinthe était le point le plus sombre (une sorte de faux trou noir), les obstacles étant plus éclairés.
Quel que soit l’endroit où ils étaient initialement placés, les robots EK suivaient naturellement ces géodésiques, évitant automatiquement les murs, comme s’ils glissaient vers le bas d’une pente dans un espace déformé. L’équipe a publié ses résultats en novembre 2025 dans la revue npj robotique.
Pour Miskin, l’étude constitue un pont entre les mondes de la physique et de la technologie, « plutôt qu’une compétition entre eux », a-t-il déclaré. « D’une part, la relativité et la lumière sont très bien comprises ; leur relier le contrôle réactif invite à de nouvelles façons de penser et à des outils établis pour la robotique. D’un autre côté, la relativité générale et l’optique sont également très abstraites (pensez à la courbure de l’espace-temps), tandis que la robotique est mécaniste et concrète (il est très facile de comprendre pourquoi le robot fait ce qu’il fait). En plus de montrer comment de nouveaux types de robots se comportent selon les théories connues de l’optique, les expériences donnent aux chercheurs un aperçu « un peu plus » des connaissances générales. relativité, en particulier en explorant l’impact des « espaces-temps plats » dans les espaces 2D, a ajouté Miskin.
Bien que l’étude du labyrinthe ne soit qu’une toute première étape, Miskin a déclaré que des applications pratiques pourraient émerger au cours des 10 prochaines années.
« Certains cas d’utilisation que nous souhaitons explorer incluent le contrôle des dents après un canal radiculaire, une sorte de biopsie dentaire pour s’assurer que tout a été effacé, l’élimination des tumeurs après avoir effectué des mesures locales pour confirmer que les cellules sont cancéreuses, ou même, en dehors du bio, l’assemblage de micropuces avec de minuscules assistants robotiques », a déclaré Miskin. « Le micromonde est un endroit fascinant ; je ne serais pas surpris si ces idées ne sont que la pointe de l’iceberg. »
Sources des articles
Reinhardt, WH, Miskin, MZ Espaces-temps artificiels pour le contrôle réactif de robots aux ressources limitées. npj robotique 3, 39 (2025). https://doi.org/10.1038/s44182-025-00058-9