
0
Suivez-nous
Bulletin
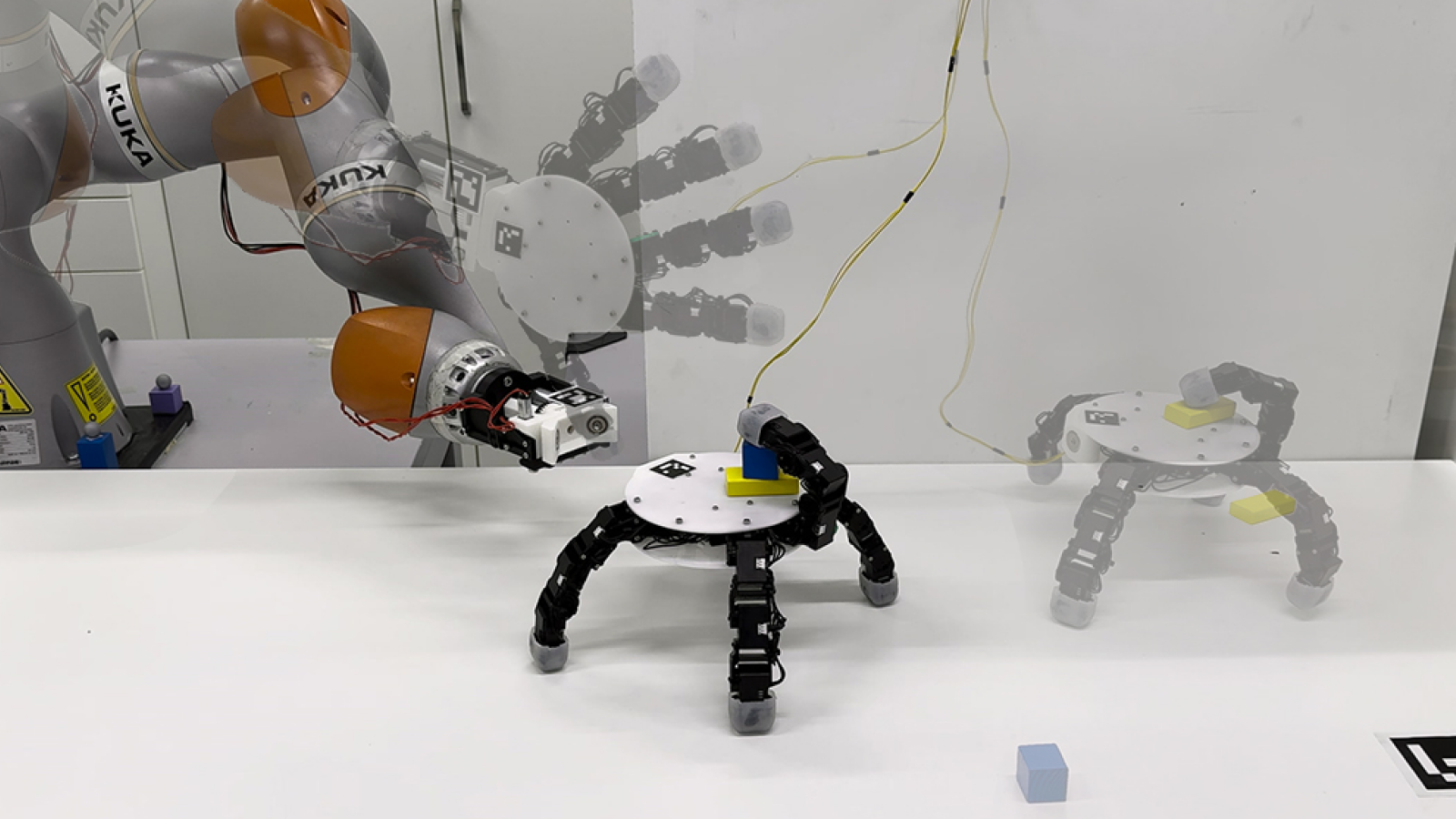
Les ingénieurs ont construit une main robotique amovible capable de ramper dans les espaces difficiles d’accès pour récupérer des objets.
Dans une étude publiée le 20 janvier dans la revue Communications naturellesdes scientifiques de l’École polytechnique fédérale de Lausanne (EPFL) ont déclaré que robot a été conçu pour combiner deux capacités habituellement séparées en robotique : la manipulation et la locomotion.
La main peut également fonctionner sans base robotisée complète et mobile. Au lieu de cela, il se détache simplement d’un bras robotique et se précipite là où il est nécessaire, ramasse l’objet et revient pour se rattacher.
Cela pourrait le rendre utile dans les situations où les robots doivent atteindre ou récupérer des objets dans des espaces trop étroits ou trop dangereux pour les bras humains, tels que les environnements industriels ou exploratoires et les zones touchées par des catastrophes, ont noté les chercheurs.
« Nous pouvons facilement voir les limites de la main humaine lorsqu’elle tente d’atteindre des objets sous des meubles ou derrière des étagères, ou lorsqu’elle effectue des tâches simultanées comme tenir une bouteille tout en ramassant une puce », co-auteur de l’étude. Aude Billard, responsable du Laboratoire d’algorithmes et systèmes d’apprentissage de la Faculté d’ingénierie de l’EPFL, a déclaré dans un communiqué déclaration.
« De même, accéder à des objets placés derrière la main tout en gardant la poignée stable peut être extrêmement difficile, nécessitant des contorsions gênantes du poignet ou un repositionnement du corps. »
Une robotique pratique
Des appendices robotiques, comme des mains, ont été construits avant. La main humaine est après tout considérée comme une merveille biologique ; cela a donné aux humains la dextérité nécessaire pour fabriquer des outils, préparer de la nourriture et construire un abri, autant d’activités qui se sont révélées essentielles à notre survie en tant qu’espèce.
Pourtant, les mains humaines présentent certaines limitations nettement biologiques, ont noté les scientifiques. Par exemple, nos pouces asymétriques et l’attachement permanent de nos mains à nos bras.
Le robot de l’EPFL est essentiellement un système autonome qui peut soit agir comme une « pince » normale au bout d’un bras, soit se détacher et se déplacer tout seul. Le design s’inspire de la nature, les chercheurs le comparant à la façon dont un pieuvre utilise ses bras pour se déplacer sur le fond marin et ouvrir des coquilles, ou comment une mante religieuse utilise ses avant-bras pointus pour se déplacer et attraper des proies.
Dans le cadre d’expériences, les chercheurs ont démontré que la main effectuait divers exercices de préhension et de préhension standard, ainsi que des exploits de dextérité plus délicats avec lesquels les humains luttent régulièrement. Il s’agissait notamment de tenir plusieurs objets à la fois ou de saisir des objets sans utiliser le pouce ou l’index.
Non seulement la main robotique peut saisir jusqu’à quatre objets simultanément, mais elle peut également ramper sur le sol tout en transportant des objets sur son « dos ».
Chacun des doigts du robot est entraîné par de petits moteurs électriques et reliés par des articulations légères imprimées en 3D, leur permettant de s’enrouler et de s’écarter un peu comme des doigts humains. Cependant, contrairement à une main humaine, chaque articulation d’un doigt peut se plier à la fois vers l’avant et vers l’arrière, ce qui lui permet de saisir des objets dans les deux sens et de « retourner » son orientation de travail sans avoir besoin de tourner au niveau du poignet.
Le bout des doigts est recouvert d’une couche de silicone souple pour ajouter de la friction, ce qui facilite la tenue sécurisée des objets et maintient la traction lorsque vous rampez. « Il n’y a pas de réelle limitation dans le nombre d’objets qu’il peut contenir ; si nous devons tenir plus d’objets, nous ajoutons simplement plus de doigts », a déclaré Billard.
La main se rattache au bras grâce à un système « snap-and-lock ». Les aimants aident à aligner les connecteurs et un petit moteur entraîne un boulon de verrouillage qui sécurise les joints.
Le système pourrait éventuellement être adapté pour prothèses humaines ou augmentation de « membre supplémentaire », a déclaré l’équipe, bien que ce ne soit pas l’objectif du prototype actuel.
« La fonctionnalité symétrique et réversible est particulièrement précieuse dans les scénarios où les utilisateurs pourraient bénéficier de capacités allant au-delà des fonctions humaines normales », a déclaré Billard.
« Par exemple, des études antérieures portant sur des utilisateurs de doigts robotiques supplémentaires démontrent la remarquable capacité d’adaptation du cerveau à intégrer des appendices supplémentaires, ce qui suggère que notre configuration non traditionnelle pourrait même servir dans des environnements spécialisés nécessitant des capacités de manipulation accrues. »
Sources des articles
Gao, X., Yao, K., Junge, K. et coll. Une main robotique rampante amovible. Nat Commun 17428 (2026). https://doi.org/10.1038/s41467-025-67675-8